













产品详情
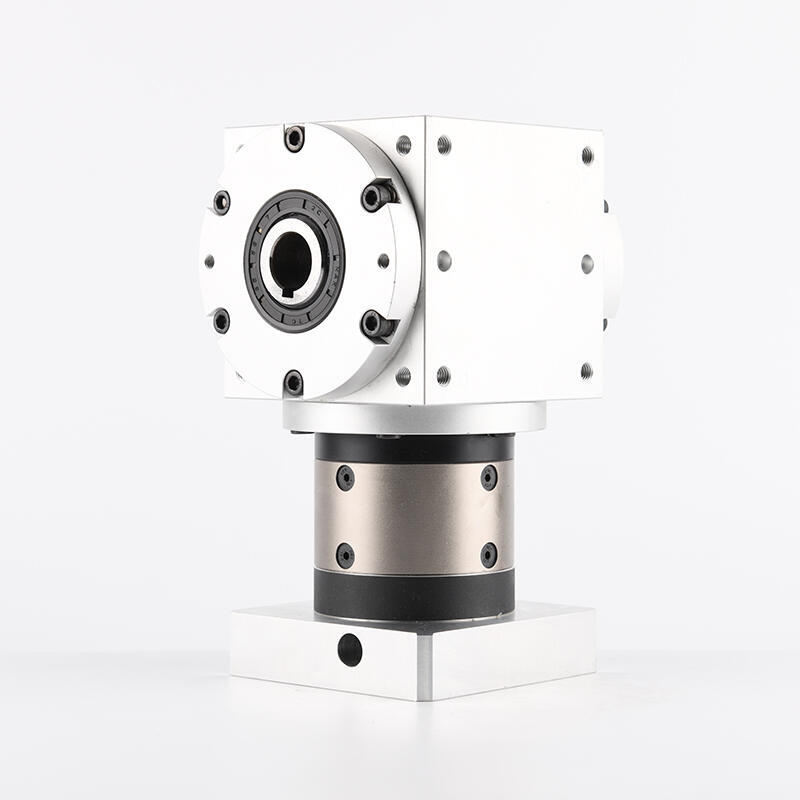
静音伺服齿轮减速机PRF60-10-L1-S2-P2正品行货
低背隙行星减速机是一种常见的机械装置,用于将电机的旋转运动转化为更低的转速和更大的力矩,以满足各种工业应用的需求。低背隙调整是指通过调整行星减速机的各个部件之间的间隙,使其具有更低的传动背隙。下面是对低背隙行星减速机低背隙调整的一般步骤:
准备工作。首先,需要将低背隙行星减速机与其他部件进行分离,并彻底清洁。这可以确保调整工作的顺利进行,避免外部因素对调整结果的影响。
调整行星轮架的安装位置。根据行星减速机的设计要求,将行星轮架安装回原来的位置,并确保与其他部件正确配合。这可以确保行星轮架的稳定性和传动效率。
调整行星轮架的轴承间隙。使用专用的工具和设备,如千分尺和螺丝刀等,调整行星轮架轴承的间隙。确保行星轮架的轴承间隙符合设计要求,以保证其运转平稳性和精度。
调整太阳轮和行星轮的间隙。根据行星减速机的设计要求,调整太阳轮和行星轮之间的间隙。这可以确保传动的稳定性和精度,并降低噪音和振动。
调整端面间隙。使用专用的工具和设备,如千分尺和螺丝刀等,调整行星减速机的前后端面间隙。确保端面间隙符合设计要求,以保证其运转平稳性和精度。
进行测试和检验。在完成低背隙调整后,需要对行星减速机进行静态和动态测试,以确保其工作正常。测试过程中需要观察行星减速机的运行状态,检查各个部件之间的配合情况,并记录相关数据。
根据测试结果进行修正。如果测试过程中发现行星减速机存在运转不平稳、噪音过大等问题,需要根据实际情况对各个部件之间的间隙进行调整,直到达到设计要求为止。
总之,低背隙行星减速机的低背隙调整需要严格遵循设计要求和制造商的指导,确保各个部件之间的间隙均匀且协调。在调整过程中需要细心和耐心,避免因操作不当而导致设备损坏或性能下降。
静音伺服齿轮减速机PRF60-10-L1-S2-P2正品行货

VRB-115-3-S3-28FE24
VRB-115-4-S3-28FE24
VRB-115-5-S3-28FE24
VRB-115-6-S3-28FE24
VRB-115-7-S3-28FE24
VRB-115-8-S3-28FE24
VRB-115-9-S3-28FE24
VRB-115-10-S3-28FE24
VRB-115-15-S3-28FE24
VRB-115-16-S3-28FE24
VRB-115-20-S3-28FE24
VRB-115-25-S3-28FE24
VRB-115-28-S3-28FE24
VRB-115-30-S3-28FE24
VRB-115-35-S3-28FE24
VRB-115-40-S3-28FE24
VRB-115-45-S3-28FE24
VRB-115-50-S3-28FE24
VRB-115-60-S3-28FE24
VRB-115-70-S3-28FE24
VRB-115-80-S3-28FE24
VRB-115-90-S3-28FE24
VRB-115-100-S3-28FE24
VRB-115-3-S3-14CA11
VRB-115-4-S3-14CA11
VRB-115-5-S3-14CA11
VRB-115-6-S3-14CA11
VRB-115-7-S3-14CA11
VRB-115-8-S3-14CA11
VRB-115-9-S3-14CA11
VRB-115-10-S3-14CA11
VRB-115-15-S3-14CA11
VRB-115-16-S3-14CA11
VRB-115-20-S3-14CA11
VRB-115-25-S3-14CA11
VRB-115-28-S3-14CA11
VRB-115-30-S3-14CA11
VRB-115-35-S3-14CA11
VRB-115-40-S3-14CA11
VRB-115-45-S3-14CA11
VRB-115-50-S3-14CA11
VRB-115-60-S3-14CA11
VRB-115-70-S3-14CA11
VRB-115-80-S3-14CA11
VRB-115-90-S3-14CA11
VRB-115-100-S3-14CA11
静音伺服齿轮减速机PRF60-10-L1-S2-P2正品行货
在行星齿轮减速机匹配伺服电机和步进电机使用时,回程背隙是一个重要的考虑因素。回程背隙是指减速机在反转时,输出轴与输入轴之间的最大转角偏差。以下是关于行星齿轮减速机匹配不同电机类型时的回程背隙对比的阐述:
行星式减速机与伺服电机的回程背隙:
行星式减速机与伺服电机的回程背隙通常较小。这是因为伺服电机具有精确的控制性能和快速的响应速度,能够在短时间内对减速机的输入轴进行精确的定位控制。同时,行星式减速机的传动效率较高,其内部行星轮系的设计可以减少反转时的空程和摩擦损失,从而减小回程背隙。
行星式减速机与步进电机的回程背隙:
相比之下,行星式减速机与步进电机的回程背隙可能会略大。步进电机虽然具有价格低廉、控制简单等优点,但其控制精度和响应速度不如伺服电机。在反转时,步进电机需要一定的时间来重新定位输出轴,这可能会导致较大的回程背隙。此外,步进电机的转动惯量较大,对减速机的传动效率也会产生一定的影响。
综上所述,行星式减速机匹配伺服电机时的回程背隙通常小于匹配步进电机。这主要是因为伺服电机具有更精确的控制性能和更快的响应速度,能够更好地控制减速机的输入轴定位。然而,在某些对成本敏感或对精度要求较低的应用中,步进电机仍然是一个可行的选择。在选择行星式减速机匹配的电机类型时,需要根据具体的应用需求进行综合考虑。

静音伺服齿轮减速机PRF60-10-L1-S2-P2正品行货
低背隙行星减速机是一种常见的机械装置,用于将电机的旋转运动转化为更低的转速和更大的力矩,以满足各种工业应用的需求。低背隙调整是指通过调整行星减速机的各个部件之间的间隙,使其具有更低的传动背隙。下面是对低背隙行星减速机低背隙调整的一般步骤:
准备工作。首先,需要将低背隙行星减速机与其他部件进行分离,并彻底清洁。这可以确保调整工作的顺利进行,避免外部因素对调整结果的影响。
调整行星轮架的安装位置。根据行星减速机的设计要求,将行星轮架安装回原来的位置,并确保与其他部件正确配合。这可以确保行星轮架的稳定性和传动效率。
调整行星轮架的轴承间隙。使用专用的工具和设备,如千分尺和螺丝刀等,调整行星轮架轴承的间隙。确保行星轮架的轴承间隙符合设计要求,以保证其运转平稳性和精度。
调整太阳轮和行星轮的间隙。根据行星减速机的设计要求,调整太阳轮和行星轮之间的间隙。这可以确保传动的稳定性和精度,并降低噪音和振动。
调整端面间隙。使用专用的工具和设备,如千分尺和螺丝刀等,调整行星减速机的前后端面间隙。确保端面间隙符合设计要求,以保证其运转平稳性和精度。
进行测试和检验。在完成低背隙调整后,需要对行星减速机进行静态和动态测试,以确保其工作正常。测试过程中需要观察行星减速机的运行状态,检查各个部件之间的配合情况,并记录相关数据。
根据测试结果进行修正。如果测试过程中发现行星减速机存在运转不平稳、噪音过大等问题,需要根据实际情况对各个部件之间的间隙进行调整,直到达到设计要求为止。
总之,低背隙行星减速机的低背隙调整需要严格遵循设计要求和制造商的指导,确保各个部件之间的间隙均匀且协调。在调整过程中需要细心和耐心,避免因操作不当而导致设备损坏或性能下降。
静音伺服齿轮减速机PRF60-10-L1-S2-P2正品行货
VRB-115-3-S3-28FE24
VRB-115-4-S3-28FE24
VRB-115-5-S3-28FE24
VRB-115-6-S3-28FE24
VRB-115-7-S3-28FE24
VRB-115-8-S3-28FE24
VRB-115-9-S3-28FE24
VRB-115-10-S3-28FE24
VRB-115-15-S3-28FE24
VRB-115-16-S3-28FE24
VRB-115-20-S3-28FE24
VRB-115-25-S3-28FE24
VRB-115-28-S3-28FE24
VRB-115-30-S3-28FE24
VRB-115-35-S3-28FE24
VRB-115-40-S3-28FE24
VRB-115-45-S3-28FE24
VRB-115-50-S3-28FE24
VRB-115-60-S3-28FE24
VRB-115-70-S3-28FE24
VRB-115-80-S3-28FE24
VRB-115-90-S3-28FE24
VRB-115-100-S3-28FE24
VRB-115-3-S3-14CA11
VRB-115-4-S3-14CA11
VRB-115-5-S3-14CA11
VRB-115-6-S3-14CA11
VRB-115-7-S3-14CA11
VRB-115-8-S3-14CA11
VRB-115-9-S3-14CA11
VRB-115-10-S3-14CA11
VRB-115-15-S3-14CA11
VRB-115-16-S3-14CA11
VRB-115-20-S3-14CA11
VRB-115-25-S3-14CA11
VRB-115-28-S3-14CA11
VRB-115-30-S3-14CA11
VRB-115-35-S3-14CA11
VRB-115-40-S3-14CA11
VRB-115-45-S3-14CA11
VRB-115-50-S3-14CA11
VRB-115-60-S3-14CA11
VRB-115-70-S3-14CA11
VRB-115-80-S3-14CA11
VRB-115-90-S3-14CA11
VRB-115-100-S3-14CA11
静音伺服齿轮减速机PRF60-10-L1-S2-P2正品行货
在行星齿轮减速机匹配伺服电机和步进电机使用时,回程背隙是一个重要的考虑因素。回程背隙是指减速机在反转时,输出轴与输入轴之间的最大转角偏差。以下是关于行星齿轮减速机匹配不同电机类型时的回程背隙对比的阐述:
行星式减速机与伺服电机的回程背隙:
行星式减速机与伺服电机的回程背隙通常较小。这是因为伺服电机具有精确的控制性能和快速的响应速度,能够在短时间内对减速机的输入轴进行精确的定位控制。同时,行星式减速机的传动效率较高,其内部行星轮系的设计可以减少反转时的空程和摩擦损失,从而减小回程背隙。
行星式减速机与步进电机的回程背隙:
相比之下,行星式减速机与步进电机的回程背隙可能会略大。步进电机虽然具有价格低廉、控制简单等优点,但其控制精度和响应速度不如伺服电机。在反转时,步进电机需要一定的时间来重新定位输出轴,这可能会导致较大的回程背隙。此外,步进电机的转动惯量较大,对减速机的传动效率也会产生一定的影响。
综上所述,行星式减速机匹配伺服电机时的回程背隙通常小于匹配步进电机。这主要是因为伺服电机具有更精确的控制性能和更快的响应速度,能够更好地控制减速机的输入轴定位。然而,在某些对成本敏感或对精度要求较低的应用中,步进电机仍然是一个可行的选择。在选择行星式减速机匹配的电机类型时,需要根据具体的应用需求进行综合考虑。
静音伺服齿轮减速机PRF60-10-L1-S2-P2正品行货
